News
- [12/2024] Received the NVIDIA Graduate Fellowship 2025.
- [11/2024] Selected as one of the Top Reviewers in NeurIPS 2024.
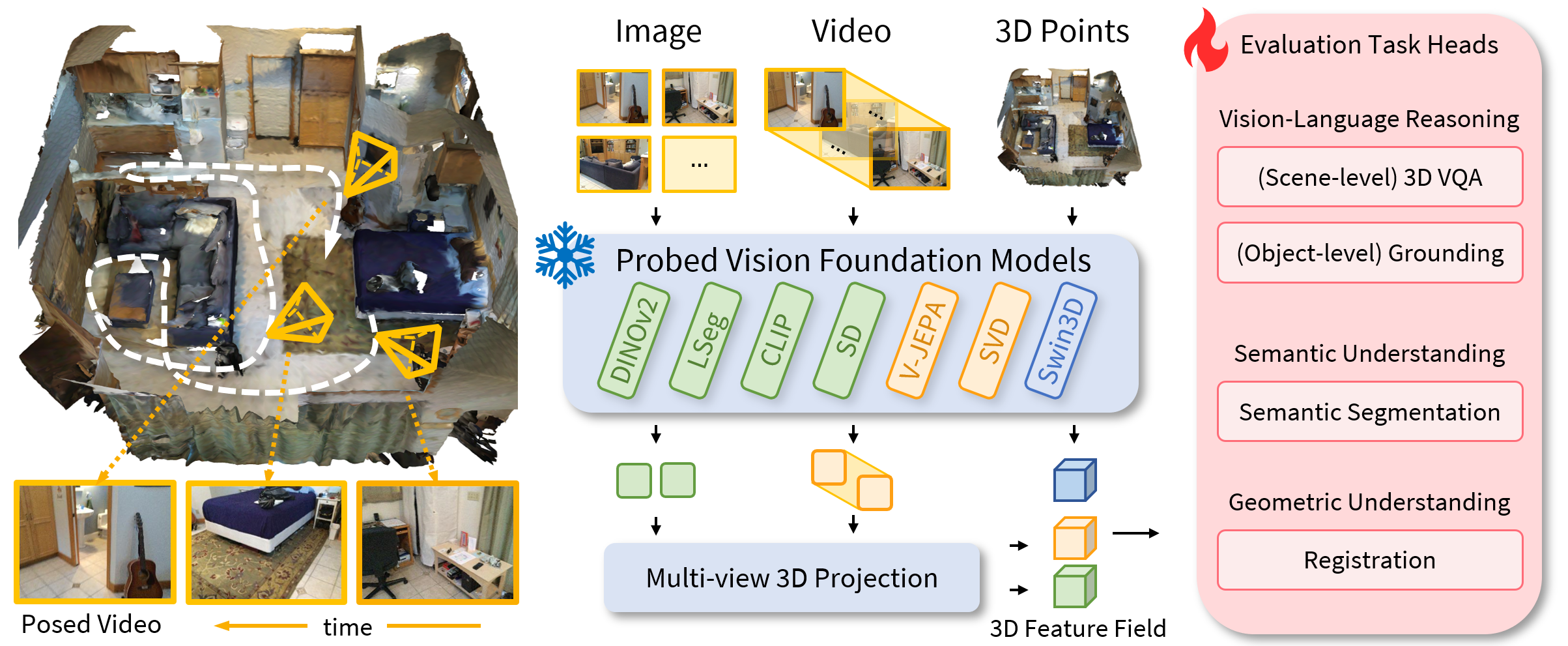
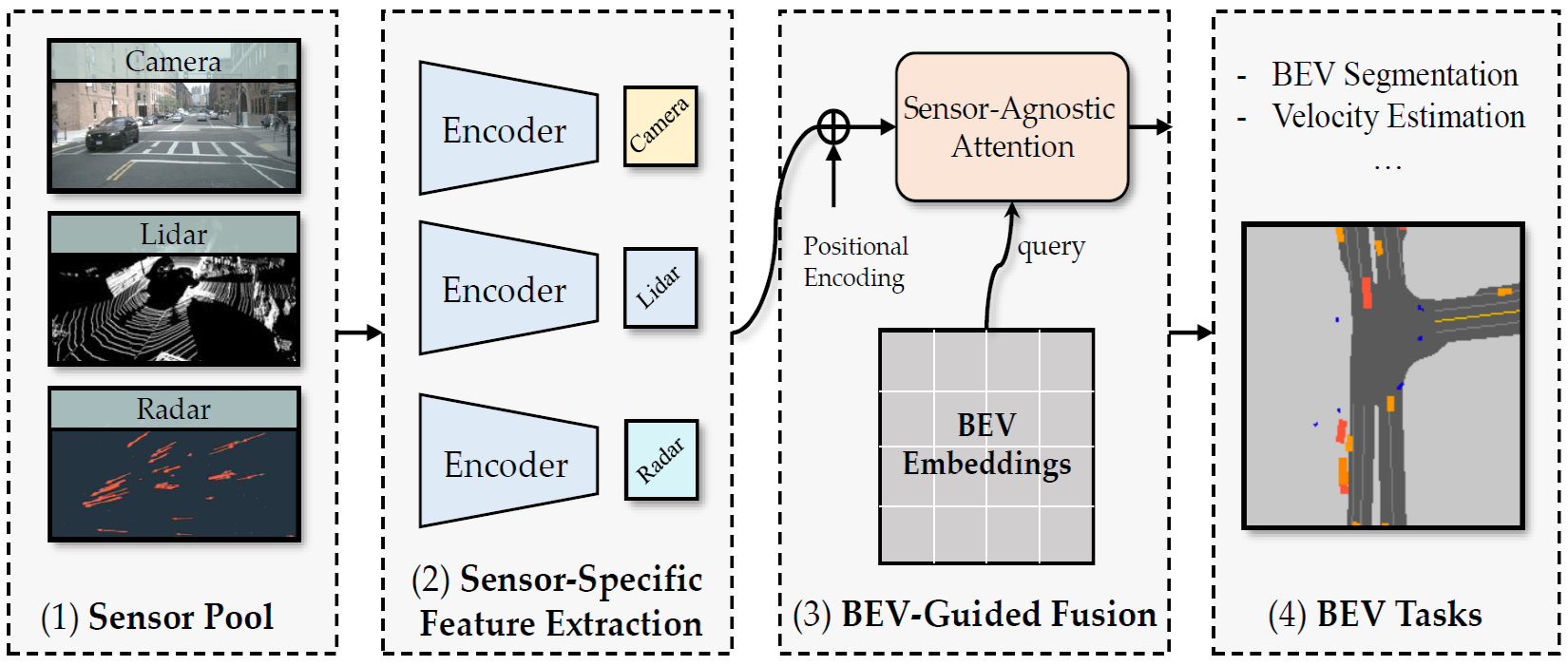
- [09/2024] Lexicon3D accepted to NeurIPS 2024!
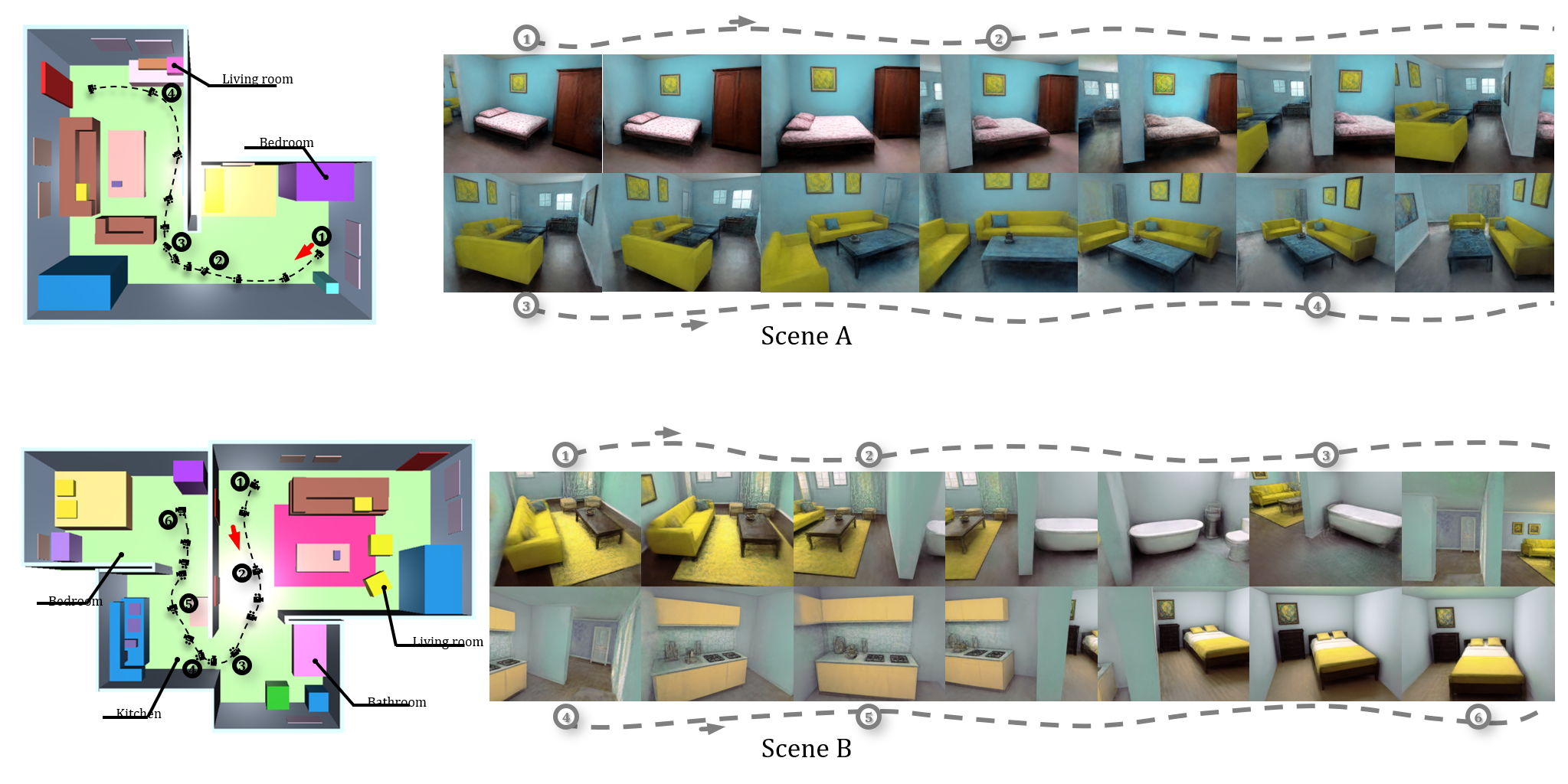
- [09/2024] SceneCraft accepted to NeurIPS 2024!
- [05/2024] Selected as one of the Outstanding Reviewers in CVPR 2024.
- [05/2024] Started my internship at NVIDIA Research. Look forward to seeing you in Bay Area!
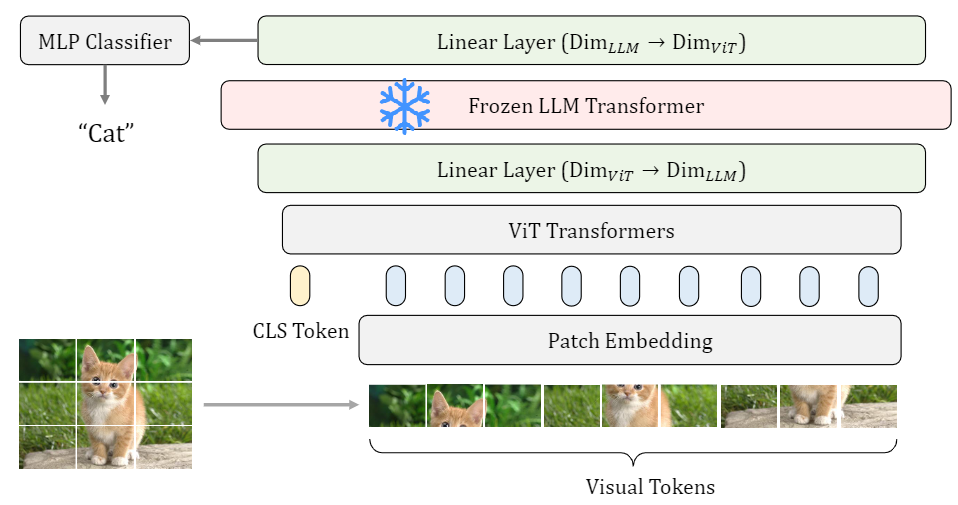
- [01/2024] LLM4Vision accepted to ICLR 2024 (Spotlight)!
- [02/2023] I passed the qualifying exam and officially became a Ph.D. candidate!